(遥感)利用 Sentinel 卫星影像数据研究某市地震引发的地表形变
前情概要
据中国地震台网正式测定:07 月 03 日 20 时 57 分某市发生 3.7 级地震,震源深度 9 千米。某分析小组将用遥感卫星影像数据分析地震前后地表发生的形变。
检查 SARscape 在 ENVI 中的配置
- 安装 ENVI 以及 SARscape 扩展
- 下载研究地区对应时段的 Sentinel 卫星影像和 DEM
- 检查 SARscape 在 ENVI 中的配置
- 有条件的话还可以准备 GPC 文件,但它不是必须的
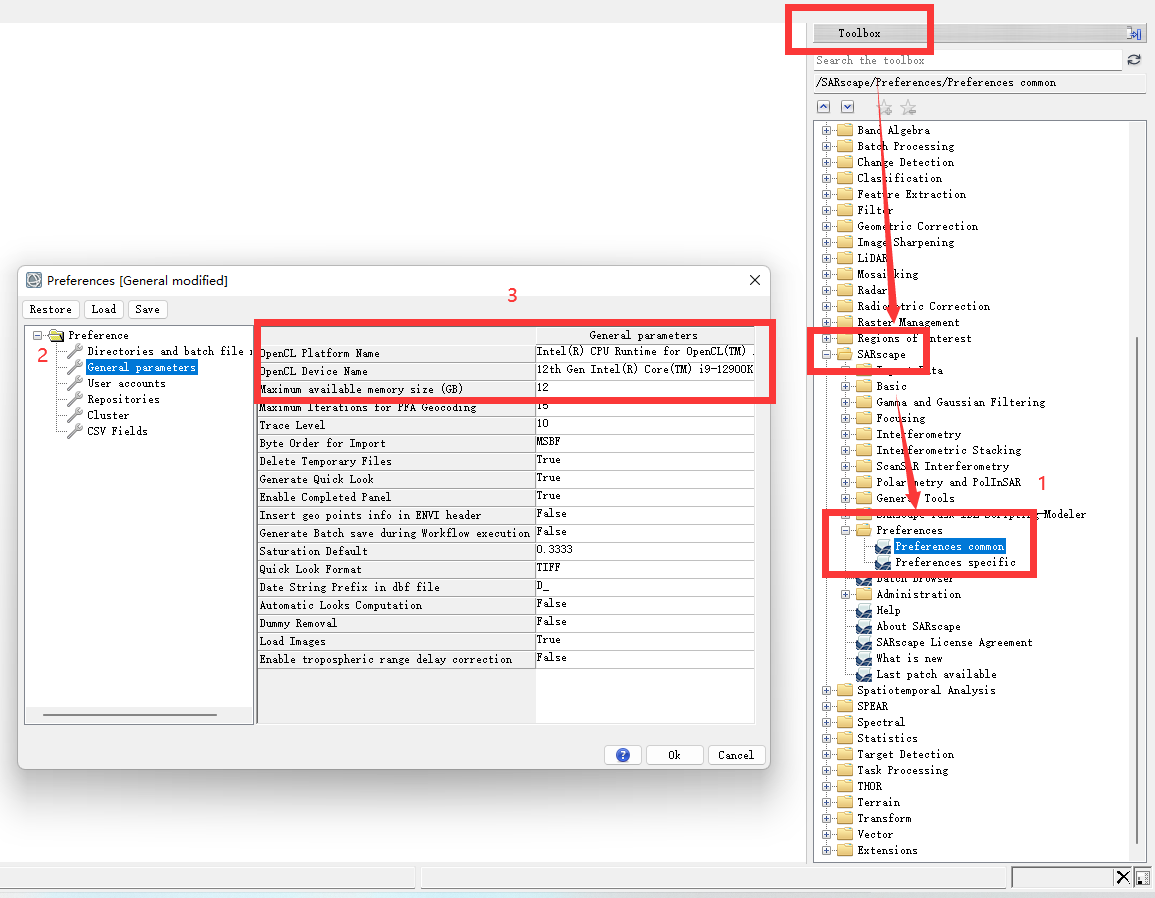
设置内存占用限制,检查 OpenCL 硬件加速的配置情况, 我这里没有独显就只开了核显 。

应用 ENVI 自带的 Sentinel 参数设置
加载 Sentinel 卫星影像
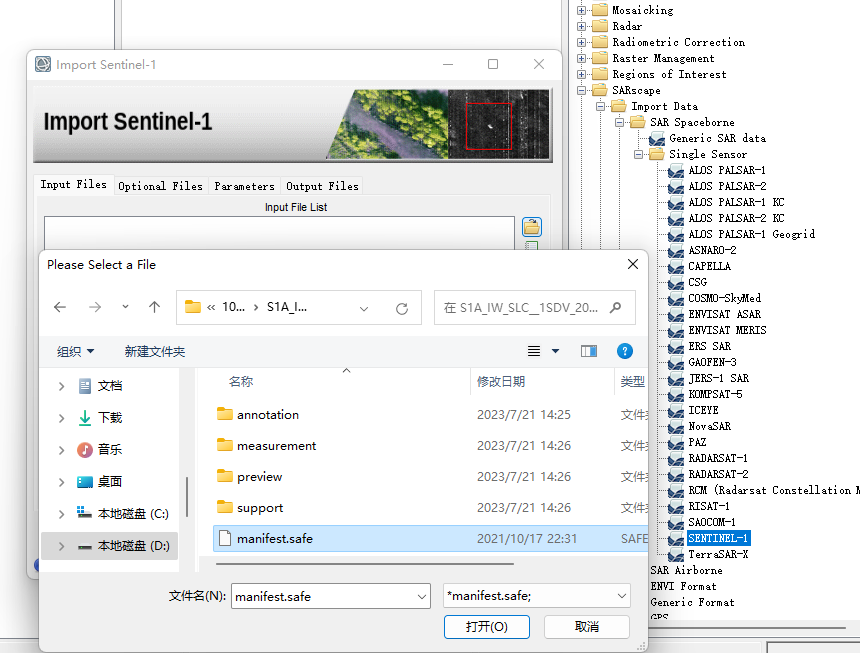
依次导入所有影像,选择统一输出的目录,点击 Exec 开始读取。
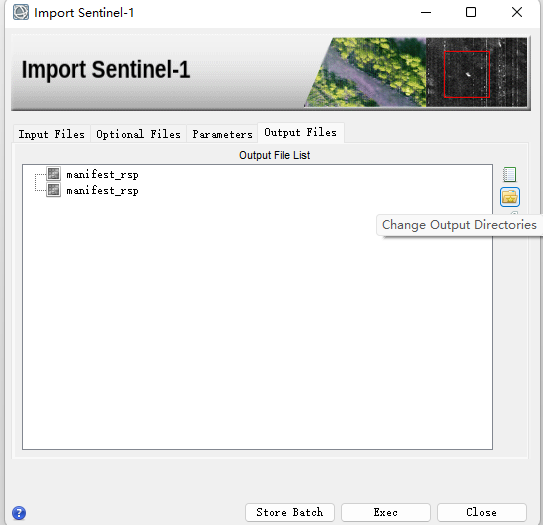
(SARscape 默认为每个步骤的输出文件重命名为 原文件名 加 特定后缀 ,有特殊需求可以在 Parameters 里更改。)
基线估算
打开基线估算
/SARscape/Interferometry/Interferometric Tools/Baseline Estimation

输入主从影像的 _list 文件,点击 Exec 开始执行。
1 | Normal Baseline (m) = -40.038 Critical Baseline min - max(m) = [-6475.240] - [6475.240] |
基线估算的结果显示,这两景数据的空间基线为-40.038米,位于临界基线 ±6475.240 米之内,时间基线 12 天,做 DInSAR 的一个相位变化周期代表的地形变化为 0.028 米。
DInSAR Displacement WorkFlow 工作流
选择需要处理的影像
打开 DInSAR Displacement WorkFlow 工作流。
/SARscape/Interferometry/DInSAR Displacement Workflow
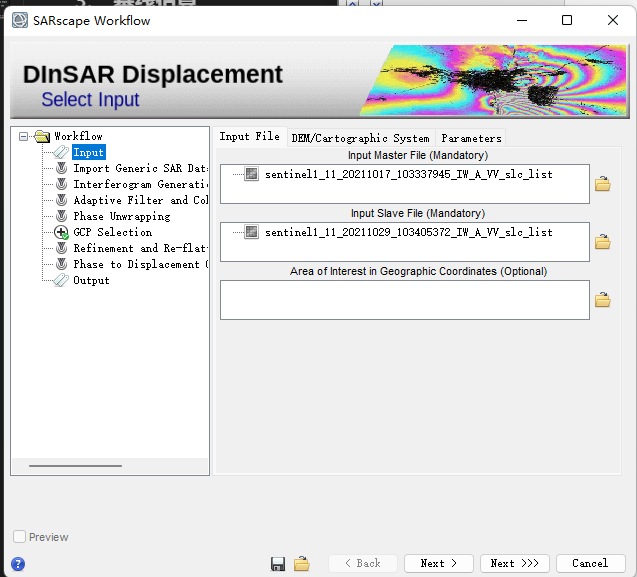
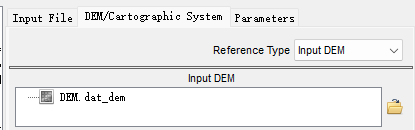
选择主从影像,引用 DEM 。(没有准备 DEM 可以在 Toolbox/SARscape/General Tools/DEM Extraction/SRTM-3 Version 4 里下载 )
接着左侧的选项栏可以直接调整每个步骤的参数,调完所有的之后再启动可以无人值守跑完整个流程。
注意不要点到 Next 去了,调一步走一步会很浪费时间。
干涉图生成
选择 lnterferogram Generation。
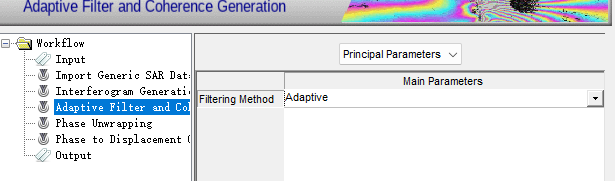
干涉图滤波和相干性计算
在左侧的选项栏找到Adaptive Filter and Coherenace Generation,对上一步生成的差分干涉图进行滤波,对干涉图的噪声进行一定程度的抑制,计算干涉像对的相干系数。
如果你的影像分辨率很高,应当使用对高分辨率影像更友好算法。(分辨率不到 5 米的可以跳过这步)
相位解缠
选择Phase Unwrapping。干涉图中的相位,从 -π 到 π 呈周期性变化,当真实相位值大于 π 时,相位会重新从 -π 开始,以 2π 为周期循环。相位解缠是将相位由差分相位恢复为真实值的过程。根据需要选择解缠方法,解缠分解等级和解缠最小相干系数阈值。
轨道精炼
进入GCP selection,使用一组代表稳定位置的 GPC 点,进行多项式拟合,对轨道误差进行去除,优化相位解缠的结果。
相位转形变与地理编码
选择Phase to Displacement Conversation and GeoCoding,将经过轨道精炼和重去平的解缠相位,转换为形变,并地理编码到地理坐标系。
开始处理
如果没有什么其他特殊需求的话其他的地方,其他参数就都按自动填写的默认值就好了。

都调完了后就在Output选择结果文件的输出路径。
然后回到Input直接点 NEXT >>> 开始任务。
我的高精度影像数据在工作站满载跑了一个晚上才跑完,所以配置比较差的朋友可能要注意合理安排时间。
附配置单
E5 2666v3 2
1080 Ti 1
96 GB DDR4
1TB SSD
结果分析
图中可以看到,颜色越红的区域就是影响越大的区域。
 刚好是咖啡的售价
刚好是咖啡的售价- 按你的喜好投食